



Бо рушди муттасили автоматикунонии логистика ва интеллектуализатсия, корхонаҳо дигар танҳо бо такмили автоматӣ ва табдил додани як хатти истеҳсолӣ ё анбори ягона маҳдуд намешаванд. Аз ин ру, таъ-миноти моддию техникии тамоми комбинат тезонда, давраи таъминоти калон фаро мерасад. Бо вуҷуди ин, дар шакли бозори роботҳои мобилӣ, аз сабаби набудани рушди саноат, барои як истеҳсолкунанда мустақилона анҷом додани тиҷорати умумии хати истеҳсолӣ, анбор ва анбори паҳлӯи хат хеле душвор аст. Аз ин рӯ, омезиши амудӣ ва уфуқӣ интихоби стратегии бисёре аз истеҳсолкунандагони роботҳои мобилӣ дар ин марҳила шудааст.

Ҳамкории стратегӣ байни HEGERLS ва Hairou дар инноватсия
Дар солҳои охир, Hebei Walker Metal Products Co., Ltd. (бренди худфиребӣ: HEGERLS) ва Hairou Innovation ҳамкориҳои стратегиро эълон карданд ва якҷоя аввалин роботи технологияи саноатии лазерии SLAM-и бисёрқабатаи AGV-ро ба кор андохтанд ва шарики беҳтаринро барои анбори паҳлӯи корхона, кушодани давраи нави коркарди саноатӣ ва якҷоя такмил додани саноати логистикии интеллектуалӣ.

Дар бораи Hebei Walker Metal Products Co., Ltd. [Бренди худ: HEGERLS]
Hebei Walker Metal Products Co., Ltd., ки соли 1996 таъсис ёфтааст, як ширкати барвақтест, ки ба саноати раф дар шимоли Чин машғул аст. Дар соли 1998, он ба фурӯш ва насби таҷҳизоти анбор ва логистикӣ оғоз кард. Пас аз беш аз 20 соли рушд, он як провайдери ягонаи хидматрасонии ҳамгирошудаи анбор ва логистика гардид, ки тарҳрезии лоиҳаи анбор ва логистика, истеҳсоли таҷҳизот ва иншоот, фурӯш, ҳамгироӣ, насб, ба кор андохтан, омӯзиши кадрҳои идоракунии анборҳо, пас аз хидматрасонии фурӯш ва ғайра, инчунин як корхонаи баландтехнологӣ мебошад, ки ба истеҳсоли интеллектуалӣ ва логистикаи интеллектуалӣ тамаркуз мекунад. Тиҷорати он рафҳои анборро дар бар мегирад: рафҳои трафикҳо Рафи рахи салиб, рафи анбори стереоскопӣ, рафи болохона, рафи фарш, рафи кантилвер, рафи мобилӣ, рафи равон, раф дар раф, рафи вазнинӣ, рафи миёна, рафи зич, платформаи пӯлод, зидди зангзанӣ раф ва ғайра; Анбори стереоскопии нигоҳдорӣ: анбори стереоскопии shuttle, анбори стереоскопии болор, анбори стереоскопии болохона, анбори стереоскопии навъи ошёна, анбори стереоскопии кантилвер, анбори стереоскопии мобилӣ, анбори стереоскопии равон, гардон дар анбори стереоскопӣ, анбори стереоскопии вазнин ва ғайра; Таҷҳизоти нигаҳдории интеллектуалӣ: мошини боркаш, мошини дуҷониба, мошини чорҷониба, stacker, зерсохтор, лифт, системаи интиқол ва ҷудокунии интеллектуалӣ, қуттии гардиш, паллет, қафаси нигоҳдорӣ, контролери умумии AMR, борбардори автоматӣ ва ғайра; Системаи анбор ва нигоҳдорӣ ва ҳалли: мошини боркаш + борбардор, боркаши боркаш + стакер, зер автобус + лифт, мошини боркаши чортарафа, стакери AS/RS, системаи интеллектуалии интиқол ва ҷудокунӣ, нармафзори системаи визуалии саноатӣ ва ҳалли интеллектуалии биниш, ҳалли ягона ва хидматҳо барои муштариён дар ҳама соҳаҳо ва мусоидат ба табдил ва такмили иттилооти саноатӣ, рақамӣ ва иктишофӣ.
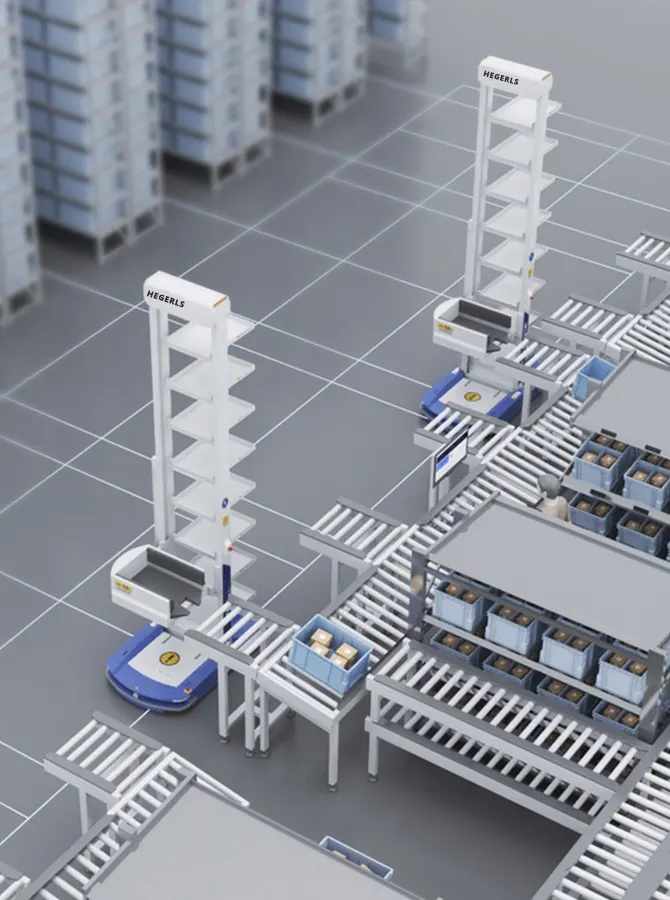
HEGERLS - лазерии SLAM бисёрқабатаи партовгоҳ барои ҷамъоварии роботи AGV
Аввалин роботи технологияи саноатии лазерии бисёрқабатаи SLAM, ки аз ҷониби HEGERLS ва Hairou Innovation якҷоя таҳия шудааст, метавонад навигатсияи лазерии SLAM-ро амалӣ созад. Он бо контролери асосии SRC муҷаҳҳаз аст ва дорои чаҳор нуқтаи муҳими функсионалӣ мебошад. Он навигатсия, бехатарӣ ва бисёрфунксияро муттаҳид мекунад. Он васлкунии чандир, дуруст интихоб ва ҷойгиркунӣ ва коркарди муассирро дарк мекунад. Он шарики беҳтарини анбори паҳлӯи хати завод мегардад, ки ба истеҳсоли оқилона имкон медиҳад. Солҳои охир ин роботи нав таваҷҷуҳи корхонаҳои калону миёнаро ба худ ҷалб карда, аксари онҳо онро ба кор андохтанд, ки якдилона таҳсину писанд омад.
SLAM (Simultanous Localization and Mapping) технологияи ҷойгиркунии мавқеъ ва сохтани харитаҳо дар вақти воқеӣ номида мешавад. Робот дорои вазифаҳои интихоб ва коркарди оқилона, навигатсияи автономӣ, канорагирӣ аз монеаҳои фаъол ва пуркунии автоматӣ мебошад. Лазерии SLAM контури муҳити атрофро барои сохтани харитаи абрии нуқтаи муҳити атроф скан мекунад ва сипас харитаи абрии нуқтаи сохташударо бо абри нуқтаи вақти воқеӣ, ки аз ҷониби лазер барои ҷойгиркунӣ ва паймоиш скан шудааст, мувофиқ мекунад. Технологияи саноатии лазерии SLAM, ки қуттии маводи бисёрқабатаи ҷамъоварии роботи ниҳонии AGV мебошад, роботи нигоҳдории навъи қуттии баландсифат мебошад, ки бо технологияи пешрафтаи нармафзор ва сахтафзор муттаҳид карда шудааст. Он махсус барои сенарияҳои анбори паҳлӯи хат тарҳрезӣ шудааст ва технологияи навигатсионии лазерии SLAM-ро барои ноил шудан ба мавқеъгирии дақиқ истифода мебарад. Технологияи саноатии лазерии SLAM қуттии маводи бисёрқабата, ки роботи ниҳонии AGV-ро мегирад, метавонад ба пеш ва ақиб ҳаракат кунад ва метавонад ба ҳар кунҷ дар ҷои худ гардиш кунад. Дар баробари ин, он дорои хусусиятҳои устувории баланд ва амалиёти дақиқ. Модули мукаммали канорагирӣ аз монеаҳои бехатарӣ ва тадбирҳои муҳофизати фаъол ва ғайрифаъолии робот метавонад ҷудоии одам ва мошинро амалӣ созад. Вақте ки одамон тасодуфан ба майдони робот ворид мешаванд, онҳо инчунин метавонанд ба таври оқилона муайян кунанд, ҳушдор диҳанд ва муҳофизати хомӯширо амалӣ кунанд. Илова бар ин, системаи нармафзор бо технологияи саноатии лазерии бисёрқабатаи SLAM, ки роботи ниҳонии AGV-ро ҷамъоварӣ мекунад, метавонад эҳтиёҷоти системаҳои марбут ба тиҷоратро иҷро кунад, ки барои идоракунии фасеҳи анборҳои паҳлӯи хат хеле мувофиқ аст. Системаи нармафзор ба таври худкор дар тамоми раванд иттилооти моддиро коркард ва ҷамъоварӣ мекунад, дастурҳои қабул ва интиқол, ҷамъоварӣ ва тақсимотро дақиқ ва самаранок иҷро мекунад, идоракунии оқилонаи анбори паҳлӯи хаттиро амалӣ мекунад, бо тартиби муқарраршуда аз анбор ва анбор ҷамъоварӣ мекунад. анборҳои дақиқи партияҳои молҳо ва ба мизоҷон барои ноил шудан ба истеҳсоли каммасраф кӯмак мекунад.

HEGERLS - лазерии SLAM бисёрқабатаи партовгоҳ, роботи AGV барои ҳалли нуқтаҳои дарди нигаҳдорӣ тамаркуз мекунад
❑ Тарҳрезии суперинсонӣ
Технологияи саноатии лазерии SLAM қуттии маводи бисёрқабатаи чидани роботи ниҳонии AGV тарҳи ғайриинсониро қабул мекунад, то ба баландии 0,4 м ~ 1,86 м ноил шавад, ба режими кори дастӣ мутобиқ шавад, ба баландиҳои сершумори амалиёт чандир мувофиқат кунад, таҷрибаи бароҳати амалиётро эҷод кунад ва инсонро ба даст меорад. мутақобилаи компютер дӯстона бештар.
❑ Ҷойгиркунии хеле чандир
Дар вокуниш ба муҳити кории тағйирёбанда, технологияи саноатии лазерии бисёрқабатаи SLAM, роботи AGV-и ниҳонии партовгоҳ ба тағири чандири сайти амалиётӣ, бидуни паймоиши коди дученака мутобиқ мешавад, маҳдудиятҳои анъанавии конвейерро мешиканад ва истеҳсоли дискретиро амалӣ мекунад ва чандир, ки ба истеҳсоли оқилона имкон медиҳад.
❑ Ҷойгиркунии хеле фасеҳ
Кори фабрика мураккаб ва гуногун буда, талабот ба тачхизоти моддию техникй низ гуногун аст. Технологияи саноатии лазерии бисёрқабатаи SLAM роботи ниҳонии AGV метавонад бо таҷҳизоти гуногун, аз ҷумла ролик, раф, AGV ниҳон, истгоҳи сунъӣ ва дигар платформаҳои амалиётӣ, ки онҳоро озодона гирифтан ва ҷойгир кардан мумкин аст ва ба таври беохир пайваст карда шаванд. чунон ки шумо мехоҳед, бо доираи васеи сенарияҳои барнома.
❑ Гирифтан ва ҷойгиркунии хеле дақиқ
Системаи дастгирии роботҳои бисёрқабати лазерии SLAM пайваст карда шудааст ва AI-и визуалӣ барои ноил шудан ба интихоб ва ҷойгиркунии дақиқ, ҷамъоварӣ ва коркарди оқилонаи мавод ва кӯмак ба кори хеле самаранок истифода мешавад.
❑ Худтаъминкунӣ
Шассии технологияи саноатии лазерии SLAM бисёрқабатаи партовгоҳ, ки роботи ниҳонии AGV дорад, бо чархҳои гардонанда ва чархҳои рондашуда муҷаҳҳаз шудааст. Реҷаи дифференсиалии чархи дугона қабул шудааст, ки барои рондани робот ва иваз кардани хат дар ҷойҳои танг мусоид аст. Робот метавонад зуд ба пеш ва ба ақиб ҳаракат кунад ва инчунин метавонад дар ҳар кунҷ дар ҷои аввала гардиш ва самтро тағир диҳад. Лазери саноатии илм ва технологияи SLAM қуттии маводи бисёрқабатаи чидани роботи ниҳонии AGV дастурҳои коркард ва роҳпаймоиро, ки аз ҷониби системаи банақшагирии компютерӣ дода шудааст, иҷро мекунад, метавонад суръат, самт, тормоз ва ғайраро танзим кунад ва гузориш додани ҳолати пиёдагардро ба системаи банақшагирӣ, то ба даст овардани идоракунии мустақили бесарнишин. Механизмҳои сершумори бехатарии худи робот метавонанд бехатарии кормандон ва роботҳоро дар раванди коркарди мустақил таъмин кунанд.
❑ Пуркунии худ
Технологияи саноатии лазерии SLAM қуттии маводи бисёрқабата, ки роботи ниҳонии AGV-ро мегирад, метавонад функсияи пуркунии барқро амалӣ кунад. Вақте ки қудрати робот қариб тамом мешавад, овоз мегӯяд, ки қувваи барқ нокифоя аст ва робот мувофиқи фармони системаи диспетчерӣ ба таври худкор ба мавқеъи пуркунандаи барқ меравад. Порти пуркунандаи робот бо паллаи пуркунандаи барқ бомуваффақият пайваст карда шудааст, то пуркунии барқро оғоз кунад. Робот дорои як схемаи муҳофизатии барқгиранда барои таъмини пуркунии бехатари он мебошад. Пас аз пур кардани барқ, робот ба таври худкор пуркунии барқро қатъ мекунад.

❑ Муҳофизати бехатарӣ
Технологияи саноатии лазерии SLAM қуттии маводи бисёрқабата, ки роботи ниҳонии AGV дорад, дорои функсияҳои сершумори муҳофизати бехатарӣ барои таъмини кори бехатар ва боэътимоди кормандон ва тамоми система мебошад.
❑ Навигатсияи ултра бехатар
Роботи илмию технологии саноатии лазерии бисёрқабатаи SLAM барои ҷамъоварии партовҳои ниҳонии AGV бо контролери SRC, ки аз ҷониби Xiangong Intelligence таҳия шудааст, сохта шудааст, ки роботро бо вазифаҳои асосӣ, аз қабили сохтани харита, ҷойгиркунӣ, паймоиш, банақшагирии бисёр мошин, пуркунии автоматӣ, монеаи 3D таъмин мекунад. канорагирӣ ва ғайра, паймоиши бениҳоят бехатарро амалӣ мекунад, бехатарии коргаронро муҳофизат мекунад ва барои муҳити мураккаби саҳроии омехтаи одам-мошин мувофиқ аст, ки оқилтар ва самараноктар аст.
❑ Ҳушдори садоӣ ва визуалӣ ва огоҳии овозӣ
Технологияи саноатии лазерии бисёрқабатаи SLAM, ки роботи ниҳонии AGV-ро барои ҳушдордиҳии садоӣ ва визуалӣ таъмин мекунад ва корбарон метавонанд ҳолати кори роботро дар вақти воқеӣ тавассути иттилооти ҳушдори садоӣ ва визуалӣ донанд.
❑ Муҳофизати бехатарии қатъи фавқулодда
Бо мақсади таъмини бехатарии робот ва операторон корпуси робот бо чор тугмаи қатъи фавқулодда муҷаҳҳаз карда шудааст, ки мутаносибан дар чапи пеши чап ва рости қафои шасси ва дар ду тарафи сутунҳои бардорандаи чап ва рост ҷойгиранд. Муҳофизати бехатарии қатъи фавқулодда метавонад бехатарии кормандон ва таҷҳизотро дар ҳолатҳои фавқулоддаи гуногун ба ҳадди аксар расонад. Тугмаи қатъи фавқулоддаро пахш кунед, то муҳофизати бехатарии қатъи фавқулоддаро фаъол созед ва тугмаро бо ақрабаки соат гардиш кунед, то тугмаи қатъи фавқулоддаро аз нав танзим кунед.
❑ Муҳофизати бардоред
Таҷҳизоти бастабандии зидди афтидан электромеханикӣ, ки дар зери сутуни борбардор дар тарафи рости робот ҷойгир аст, барои пешгирӣ кардани бардоштан ва афтидан ҳангоми таъмири таъмири робот истифода мешавад. Вақте ки калиди зидди афтидан бардоранда ба ҳолати "қуфлбардории бардоштан" табдил дода мешавад, механизми бардоштан робот ба ҳолати қулф ворид мешавад, механизми бардоштан бозмеистад ва схемаи барқ бурида, муҳофизати дугонаи бехатариро таъмин мекунад. Вақте ки калиди зидди афтидан бардоранда ба фишанги "қуфлбардори бардоштан" кашида мешавад, муҳаррики борбардор кори муқаррарии борбардориро дубора оғоз мекунад. Ҳангоме ки кормандони хидматрасонӣ дар робот нигоҳубини муқаррарӣ ва бартараф кардани мушкилотро анҷом медиҳанд, онҳо бояд калиди зидди афтиданро ба ҳолати "қулфи бардоранда" табдил диҳанд, то аз афтидан ва бехатарии кормандон муҳофизат кунанд.
❑ Муҳофизати бархӯрд
Кунҷҳои пеш ва паси шасси технологияи саноатии лазерии SLAM бисёрқабатаи партовгоҳҳои ниҳонии AGV мутаносибан бо контактҳои бехатарӣ барои муҳофизат аз бархӯрди робот муҷаҳҳаз шудаанд, ки метавонанд бехатарии робот ва кормандонро самаранок муҳофизат кунанд. Вақте ки монеа аз баландии муайянкунии модули канорагирӣ аз монеаҳои лазерии радар пасттар аст, он метавонад ба тамоси бехатари робот зарба занад. Ҳангоми зада шудан ба монеа, контакти бехатарӣ пахш карда мешавад ва маълумот ба схемаи идоракунӣ фиристода мешавад ва роботи фавқулодда тормоз карда, ба ҳолати муҳофизати бехатарӣ дохил мешавад. Дар айни замон, чароғи сурхи боло муддати тӯлонӣ фурӯзон аст, чароғҳои индикатори пеш ва пушти шасси фурӯзонанд ва садо садои ҳушдори қатрагиро бо ҳамроҳии огоҳии овозӣ мефиристад.
❑ алоқаи шабакавӣ
Технологияи саноатии лазерии SLAM бисёрқабатаи партовгоҳ, ки роботи ниҳонии AGV-ро дастгирӣ мекунад, Wi Fi ё 5G ва усулҳои дигари иртиботро дастгирӣ мекунад. Он метавонад ба платформаи идоракунии оқилона тавассути шабакаи бесим пайваст карда шавад, ки метавонад ҳолати корӣ ва саломатии роботро дар вақти воқеӣ назорат кунад. Ҳангоми рух додани истисно, робот маълумоти истисноиро ба платформаи идоракунии соҳибақл тавассути шабака гузориш медиҳад ва техникҳо метавонанд ин мушкилотро мувофиқи сабти истисно ва маълумоти дигар ҳал кунанд.
❑ Идоракунии интеллектуалӣ
Технологияи саноатии лазерии бисёрқабатаи SLAM роботи AGV-и ниҳонии партовгоҳ як роботи хеле интеллектуалӣ мебошад, ки дастрасӣ ба платформаи идоракунии интеллектуалӣ ва платформаи идоракунии тарафи сеюмро дастгирӣ мекунад. Платформаи идоракунии интеллектуалӣ мағзи интеллектуалии робот мебошад, ки метавонад бо системаи идоракунии беруна пайваст шавад, равандҳои тиҷоратиро коркард кунад, таҳлили маълумот ва идоракунии визуалӣ гузаронад; Банақшагирии воқеии роботҳои сершумор ва таҷҳизоти гуногуни логистикиро таъмин кунед, пешгӯӣ ва мониторинги саломатии системаро амалӣ кунед ва системаро дар асоси омӯзиши тақвият ва омӯзиши амиқ оптимизатсия кунед. Платформаи идоракунии интеллектуалӣ метавонад анборҳои интеллектуалӣ, анбор ва дигар амалиётҳоро амалӣ созад. Ба оператор танҳо лозим аст, ки тугмаи амалиётро дар интерфейси нармафзор пахш кунад ва робот мустақилона вазифаҳои гуногуни фармоишро дар доираи системаи ҷадвалбандӣ иҷро мекунад.
Аввалин роботи бисёрқабатаи лазерии SLAM, ки дар якҷоягӣ аз ҷониби HEGERLS ва HAIROO Innovation ба кор андохта шудаанд, дар коркарди паҳлӯи хат нақши муҳим мебозад, ба пайвастшавии фасењ байни таҷҳизоти истеҳсолӣ ва кори самараноки қуттиҳо ноил мегардад ва барои муштариён арзиши бештар эҷод мекунад. Ҳамзамон, дар стратегияи ҳамкории инноватсионии байни HEGERLS ва HAIROO, HEGERLS инчунин якчанд намуди роботҳои Kubao-ро муаррифӣ кард: роботи бисёрқабата HEGERLS A42, роботи контейнери дуқабата HEGERLS A42D, роботи картончини HEGERLS A42N, роботи телескопии борбардор HEGERLS A42T, тадриҷан сенарияҳои гуногуни татбиқи роботҳои нигаҳдории қуттиҳоро фаро мегирад, тамаркуз ба ҳалли нуқтаҳои дарди нигаҳдории бештар ва таъмини муштариён бо афзоиши арзиши бештар. Дар оянда, ду ҷониб барои ба даст овардани рушди муштарак имкони бештари истеҳсолоти интеллектуалӣ ва анборҳои интеллектуалиро таҳқиқ хоҳанд кард.
Вақти фиристодан: Ноябр-02-2022